ทดลองขับ Audi A6 ตั้งแต่ซีดาน 2011





ฉันไม่อ้วนฉันเต็ม!
 แม้แต่เด็กก็จะไปจักรยานสามล้อ เด็กผู้ชายนั่งสองล้อและป้าในวงเวียน - อยู่บนวงล้อเดียวกันแล้ว ทำไมต้องทำรถซีดานขับเคลื่อนล้อทั้งหมด
แม้แต่เด็กก็จะไปจักรยานสามล้อ เด็กผู้ชายนั่งสองล้อและป้าในวงเวียน - อยู่บนวงล้อเดียวกันแล้ว ทำไมต้องทำรถซีดานขับเคลื่อนล้อทั้งหมด ในช่วงวัยแรกรุ่นมันถูกวัดที่สูงขึ้นบนศัตรูพืชผนัง มีประสบการณ์ชีวิตที่ได้รับและทำให้แน่ใจว่าโดยไม่คำนึงถึงผลการสาดจะบินได้อย่างเท่าเทียมกันในการแข่งขันสลับไปสู่เรื่องที่สูงขึ้น ตัวอย่างเช่นที่ดีกว่าขับรถ ข้อพิพาทใด ๆ หลีกเลี่ยงการอภิปรายเกี่ยวกับไดรฟ์ที่ดีกว่า - ด้านหน้าหรือด้านหลัง และมีเพียงไม่กี่คนที่เจ้าของรถขับเคลื่อนสี่ล้อเท่านั้นที่ฟังข้อพิพาทเหล่านี้ด้วยรอยยิ้มวางตัว เป็นที่รู้จักกันดีว่าไดรฟ์ที่ดีที่สุดคือด้านหน้าและด้านหลังในเวลาเดียวกัน
 ทีละขั้นตอน และถ้าคุณพูดอย่างจริงจังรถยนต์ขับเคลื่อนล้อทุกล้อไปสู่ชีวิตประจำวันจากการแข่งแท่นแข่ง ในชีวิตจริงพวกเขาสามารถสนใจคนที่ชอบขี่ได้ ที่แม่นยำยิ่งขึ้นที่ใช้ประโยชน์จากรถของพวกเขาไม่ได้ดูเวลาของปี: ฝนหิมะดินหรือน้ำแข็ง บนยางมะตอยแห้งและมีอารมณ์เฉลี่ยไดรเวอร์ไม่จำเป็นต้องใช้ไดรฟ์สี่ล้อ ไดรเวอร์นี้จะไม่รู้สึก
ทีละขั้นตอน และถ้าคุณพูดอย่างจริงจังรถยนต์ขับเคลื่อนล้อทุกล้อไปสู่ชีวิตประจำวันจากการแข่งแท่นแข่ง ในชีวิตจริงพวกเขาสามารถสนใจคนที่ชอบขี่ได้ ที่แม่นยำยิ่งขึ้นที่ใช้ประโยชน์จากรถของพวกเขาไม่ได้ดูเวลาของปี: ฝนหิมะดินหรือน้ำแข็ง บนยางมะตอยแห้งและมีอารมณ์เฉลี่ยไดรเวอร์ไม่จำเป็นต้องใช้ไดรฟ์สี่ล้อ ไดรเวอร์นี้จะไม่รู้สึก ผู้ผลิตรุ่นขับเคลื่อนล้อทุกล้อของซีดานยอดนิยมและสากลกำลังนับความจริงที่ว่าเจ้าของของพวกเขาจะใช้ Mercedes 4matic หรือกอล์ฟ 4motion เป็นรถจี๊ปในการตั้งถิ่นฐานที่หัก จำนวนสูงสุดที่เจ้าของซีดานขับเคลื่อนล้อทุกล้อสามารถนับได้และนี่คือความแตกต่างของเขาในการผ่านจากปุถุชนที่เรียบง่ายเป็นโอกาสที่ยกระดับของการออกจากลานหิมะที่ปกคลุมไปด้วยหิมะในตอนเช้าหรือขับรถอย่างใจเย็นไปยังพื้นที่ประเทศ ตามหินในฤดูใบไม้ร่วง - สปริงสปริง
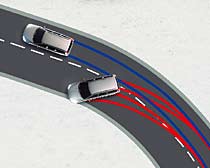
 นักออกแบบตั้งค่าขับเคลื่อนสี่ล้อบนรถยนต์นั่งส่วนบุคคลเพื่อให้เจ้าของของพวกเขารู้สึกมั่นใจมากขึ้นในสภาพถนนที่ยากลำบาก - บนถนนที่หิมะตกในภูเขาบนยางมะตอยเปียก แม้แต่คนขับมือใหม่ก็รู้ดีกว่าเขาที่จะทำลายรถลงในการลื่นไถลเช่นเมื่อผ่านการหมุนที่สูงชัน
นักออกแบบตั้งค่าขับเคลื่อนสี่ล้อบนรถยนต์นั่งส่วนบุคคลเพื่อให้เจ้าของของพวกเขารู้สึกมั่นใจมากขึ้นในสภาพถนนที่ยากลำบาก - บนถนนที่หิมะตกในภูเขาบนยางมะตอยเปียก แม้แต่คนขับมือใหม่ก็รู้ดีกว่าเขาที่จะทำลายรถลงในการลื่นไถลเช่นเมื่อผ่านการหมุนที่สูงชัน เพลาล้อหลังของรถพยายามที่จะหลุดออกไปด้านนอกอย่างต่อเนื่อง - หากกระบวนการนี้ไม่ได้ถูกควบคุมแล้วรถก็เริ่มหมุนรอบแกนของมัน เป็นที่ทราบกันดีว่ามีกฎบางอย่างสำหรับการส่งออกของเครื่องดริฟท์เฉพาะสำหรับไดรฟ์ด้านหน้าและด้านหลัง แต่สถิติก็บอกว่าบ่อยครั้งที่ผู้คนตกอยู่ในอุบัติเหตุการปลูกฝังจากคลาสสิกไปจนถึงการขับรถด้านหน้าและในทางกลับกัน
รถยนต์ขับเคลื่อนล้อทุกล้อมีความเป็นประชาธิปไตยมากในพฤติกรรมของพวกเขาและมักจะทำให้เจ้าของก้าวออกไปจากขอบของผู้ที่ไร้เชื้อเล็กน้อยเพื่อรีบไปตามถนนบนขอบของเหม็น ขีด จำกัด ของความเร็วที่อนุญาตเมื่อการหมุนเปลี่ยนสูงขึ้นมาก ดังนั้นไดรฟ์สี่ล้อจึงเป็นความเร็วและอะดรีนาลีน
 ค่าธรรมเนียมการเสี่ยง อย่าสำรวจการปรากฏตัวของป้าย 4x4 หรือ 4WD บนรถยนต์ดังกล่าวจดจำครั้งเดียวและตลอดไป - เหล่านี้ไม่ใช่ SUV ตามกฎแล้วกล่องจ่ายที่มีแพ็คเก็ตขาลงไม่ได้ติดตั้งบนรถซีดานขับเคลื่อนล้อทุกล้อ มันยังคงเป็นรถยนต์สำหรับถนนสาธารณะ แต่มักจะมีราคาแพงกว่าคู่หูเดียวของพวกเขา
ค่าธรรมเนียมการเสี่ยง อย่าสำรวจการปรากฏตัวของป้าย 4x4 หรือ 4WD บนรถยนต์ดังกล่าวจดจำครั้งเดียวและตลอดไป - เหล่านี้ไม่ใช่ SUV ตามกฎแล้วกล่องจ่ายที่มีแพ็คเก็ตขาลงไม่ได้ติดตั้งบนรถซีดานขับเคลื่อนล้อทุกล้อ มันยังคงเป็นรถยนต์สำหรับถนนสาธารณะ แต่มักจะมีราคาแพงกว่าคู่หูเดียวของพวกเขา เราได้เลือกรถเก๋งชั้นธุรกิจสามคนสำหรับการทดสอบของคุณ Mercedes E-Klasse 280 4matic (ความแตกต่างของราคากับดวงตาธรรมดา - ประมาณ 4.5 พันดอลลาร์) ออดี้ A6 2.4 Quattro (ความแตกต่างคือ $ 4,000) และ Subaru Legacy 2.5 รถยนต์มีราคาแตกต่างกัน แต่มีความคล้ายคลึงกับหลักการและอุดมการณ์
ทางเลือกค่อนข้างเป็นอัตวิสัย - Sedans, Hatchbacks และ Universals ในการส่งสัญญาณขับเคลื่อนล้อทุกแห่งนั้นเกิดจากหลาย ๆ บริษัท เหล่านี้ส่วนใหญ่เป็นสากล (Volvo, VW, Mitsubishi) แต่พวกเขาตามกฎแตกต่างจากการกวาดล้างที่สูงขึ้นอย่างง่าย
ยังมีรถยนต์สปอร์ตที่เน้นย้ำ - VW Golf และ Bora, Subaru Impreza ในแนวทาง Volvo S60 ในรถยนต์ดังกล่าวขับเคลื่อนสี่ล้อเป็นส่วยให้แฟชั่นกีฬา แต่หลักการที่วางลงในการออกแบบของพวกเขาจะไม่เปลี่ยนแปลง - มันจะถูกกล่าวถึง
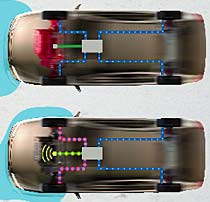
 ดีเมเริน ไดรฟ์แบบเต็มของ Mercedes ได้รับผลกระทบเป็นหลักโดยปรัชญาของ บริษัท - Mercedes-Sedan คลาสสิกต้องขับเคลื่อนล้อหลัง ดังนั้นแรงบิดจึงกระจายระหว่างล้อหน้าและหลังในอัตราส่วน 35:65 เปอร์เซ็นต์ อัตราส่วนนี้อยู่ตลอดเวลาและไม่เคยเปลี่ยนแปลง การกระจายของแรงมอเตอร์ดำเนินการผ่านการกระจายเชิงกลซึ่งรวมเข้ากับจุดสิ้นสุดของกระปุกเกียร์
ดีเมเริน ไดรฟ์แบบเต็มของ Mercedes ได้รับผลกระทบเป็นหลักโดยปรัชญาของ บริษัท - Mercedes-Sedan คลาสสิกต้องขับเคลื่อนล้อหลัง ดังนั้นแรงบิดจึงกระจายระหว่างล้อหน้าและหลังในอัตราส่วน 35:65 เปอร์เซ็นต์ อัตราส่วนนี้อยู่ตลอดเวลาและไม่เคยเปลี่ยนแปลง การกระจายของแรงมอเตอร์ดำเนินการผ่านการกระจายเชิงกลซึ่งรวมเข้ากับจุดสิ้นสุดของกระปุกเกียร์ 4matic ค่อนข้างประสบความสำเร็จในการลากรถด้วยถนนที่ไม่ดีแม้จะมีความจริงที่ว่าความแตกต่างทั้งสามไม่ได้ติดตั้งล็อค เมอร์เซเดสตามปกติไปตามทางของเขาบังคับให้ระบบ ETS ทำงานเพื่อขับเคลื่อนสี่ล้อ (ควบคุมคลัทช์อิเล็กทรอนิกส์ด้วยถนน) อาจจะถูกต้อง - การติดตั้ง ETS ซึ่งเป็นส่วนหนึ่งของระบบเบรกทั่วไปมีค่าใช้จ่ายในราคาที่ไม่แพงและมีขนาดกะทัดรัดและเชื่อถือได้
หลักการของการดำเนินงานของ ETS คือ: หากหนึ่งในล้อเริ่มลื่นนั่นคือการสูญเสียคลัทช์ที่มีถนนแล้วมันก็ช้าลงทันทีช้าลง ดังนั้นพลังของแรงบิดจึงถูกย้ายไปยังอีกล้อที่ยังคงลากรถ หากล้อหน้าหรือล้อหลังลดลงพวกเขายังคงช้าลง ความพยายามในการถ่ายโอนความแตกต่างระหว่างแกนจะถูกถ่ายโอนกลับหรือไปข้างหน้า แต่ยังคงอยู่ในอัตราส่วน 35:65 บังคับให้ปิดการใช้งานระบบ ETS - มันจะลบการควบคุมของมันไปที่ล้อหน้าโดยอัตโนมัติด้วยความเร็วมากกว่า 80 กม. / ชม. และด้านหลังด้านหลัง - มากกว่า 120 กม. / ชม.
 ร่องไม่ทำให้เสีย ไดรฟ์ทดสอบของเราแสดงให้เห็นว่า Mercedes 4matic กลายเป็นสิ่งที่ไม่สมบูรณ์ในหมู่ญาติที่ห่างไกลของเขา ในแง่ที่ว่าพฤติกรรมของเขามีลักษณะคล้ายกับมารยาทของซีดานขับเคลื่อนล้อหลังแบบคลาสสิก ด้วยการเริ่มต้นที่คมชัดด้วยสถานที่บนพื้นผิวที่ปกคลุมด้วยหิมะล้อหลังทำงานด้วยการลื่นไถล - ด้านหน้าเป็นความพยายามน้อยเกินไปที่จะเริ่มลากรถไปข้างหน้าทันที แต่ที่จุดเริ่มต้นของการเร่งความเร็วไม่มีลักษณะของการขับเคลื่อนด้านหลังไปถึงระวังการกลับมาในแจ๊สเฉพาะสาว ๆ เท่านั้น - แม้แต่ร้อยละ 35 ก็เพียงพอที่จะรักษาความมั่นคงของหลักสูตรที่ระบุไว้
ร่องไม่ทำให้เสีย ไดรฟ์ทดสอบของเราแสดงให้เห็นว่า Mercedes 4matic กลายเป็นสิ่งที่ไม่สมบูรณ์ในหมู่ญาติที่ห่างไกลของเขา ในแง่ที่ว่าพฤติกรรมของเขามีลักษณะคล้ายกับมารยาทของซีดานขับเคลื่อนล้อหลังแบบคลาสสิก ด้วยการเริ่มต้นที่คมชัดด้วยสถานที่บนพื้นผิวที่ปกคลุมด้วยหิมะล้อหลังทำงานด้วยการลื่นไถล - ด้านหน้าเป็นความพยายามน้อยเกินไปที่จะเริ่มลากรถไปข้างหน้าทันที แต่ที่จุดเริ่มต้นของการเร่งความเร็วไม่มีลักษณะของการขับเคลื่อนด้านหลังไปถึงระวังการกลับมาในแจ๊สเฉพาะสาว ๆ เท่านั้น - แม้แต่ร้อยละ 35 ก็เพียงพอที่จะรักษาความมั่นคงของหลักสูตรที่ระบุไว้ ในทางกลับกัน Khodynsky ที่ว่างเปล่าฟิลด์เริ่มระคายเคืองต่อหน้าระบบ ESP (ระบบของเสถียรภาพของหลักสูตร) เธอยับยั้งเครื่องยนต์ทันทีหากรถอย่างน้อยก็ลื่นไถลเล็กน้อย
เป็นผลให้เรามั่นใจว่าระบบ Full Drive ใน Mercedes ถูกสร้างขึ้นเพื่อปรับปรุงความปลอดภัยของการจัดการ ทำหน้าที่เป็นรถที่มีดาวสามลำแสงบนเครื่องดูดควันแม้จะเป็นคำใบ้ของคุณภาพนอกถนนของวิศวกรเดมเลอร์ - เบนซ์และไม่ได้เกิดขึ้นกับหัว
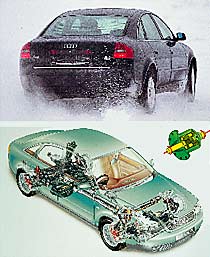 ช่างยอดนิยม. ขับเคลื่อนสี่ล้อบน Audi A6 สร้างขึ้นบนหลักการอื่น - ไม่มีอุปกรณ์อิเล็กทรอนิกส์กลศาสตร์สะอาด พื้นฐานของระบบ Quattro คือการล็อคตัวเองที่แตกต่างกัน ในช่วงปลายยุค 50 เขามากับวิศวกร GLISMAN ชื่อนี้เป็นตัวย่อของสองคำภาษาอังกฤษแรงบิดและการตรวจจับซึ่งสามารถแปลได้อย่างอิสระว่าจับได้ในขณะนี้ เพราะ torsen ใช้งานได้ประมาณ ที่ส่วนที่เหลืออยู่บนยางมะตอยระดับแห้งแรงเครื่องยนต์จะถูกส่งไปยังเพลาหน้าและด้านหลังในอัตราส่วน 50:50 และเมื่อลื่นไถลล้อความแตกต่างเริ่มขับความอยากระหว่างขวานภายใน 25 คูณ 75 เปอร์เซ็นต์ นั่นคือขึ้นอยู่กับเงื่อนไข A6 นั้นทำมากกว่าด้านหน้าเป็นระยะจากนั้นขับเคลื่อนล้อหลังมากขึ้น
ช่างยอดนิยม. ขับเคลื่อนสี่ล้อบน Audi A6 สร้างขึ้นบนหลักการอื่น - ไม่มีอุปกรณ์อิเล็กทรอนิกส์กลศาสตร์สะอาด พื้นฐานของระบบ Quattro คือการล็อคตัวเองที่แตกต่างกัน ในช่วงปลายยุค 50 เขามากับวิศวกร GLISMAN ชื่อนี้เป็นตัวย่อของสองคำภาษาอังกฤษแรงบิดและการตรวจจับซึ่งสามารถแปลได้อย่างอิสระว่าจับได้ในขณะนี้ เพราะ torsen ใช้งานได้ประมาณ ที่ส่วนที่เหลืออยู่บนยางมะตอยระดับแห้งแรงเครื่องยนต์จะถูกส่งไปยังเพลาหน้าและด้านหลังในอัตราส่วน 50:50 และเมื่อลื่นไถลล้อความแตกต่างเริ่มขับความอยากระหว่างขวานภายใน 25 คูณ 75 เปอร์เซ็นต์ นั่นคือขึ้นอยู่กับเงื่อนไข A6 นั้นทำมากกว่าด้านหน้าเป็นระยะจากนั้นขับเคลื่อนล้อหลังมากขึ้น อธิบายการทำงานของกลไกดังกล่าวนั้นค่อนข้างยาก เราจะพยายามอธิบายบนนิ้วมือว่า Hedgehogs เหล่านี้มีเพศสัมพันธ์อย่างไร ความแตกต่างถูกรวมเข้ากับกระปุกเกียร์และเป็นที่อยู่อาศัยที่ปิดซึ่งสองเพลาออกมาพูดประมาณที่เพลาหน้าและหลัง เพลาทั้งสองอยู่ในการมีส่วนร่วมอย่างหนัก
แทร็กที่แตกต่าง torsen ไม่มีการหมุนของล้อและคลัตช์ของพวกเขากับถนนในจุดของการติดต่อในขณะที่ผู้เชี่ยวชาญพูด นั่นคือการตอบสนองต่อความพยายามที่ใช้โดยล้อหมุนตามปกติแล้วดัน / ดึงรถไปในทิศทางที่ถูกต้อง การแจกจ่ายความพยายามจากมอเตอร์เกิดขึ้นในช่วงเวลาที่เหมาะสมเกือบจะทันทีตามสภาพถนน
 นั่งและเป็นผู้นำ ในการทดสอบของเราเยี่ยมชมออดี้ A6 กับมอเตอร์ 2.4 ลิตรและกล่องเกียร์แบบแมนนวล ในกรณีนี้มันไม่สำคัญว่า Mercedes และ Subaru ติดตั้ง Automata ตามอัตโนมัติของ Autopilot ความบริสุทธิ์ของการทดลองถูกสังเกตอย่างเต็มที่ ครั้งแรก Mercedes 4matic จะดำเนินการเกือบเฉพาะกับการส่งสัญญาณอัตโนมัติในการเชื่อมต่อกับการปฐมนิเทศกับตลาดอเมริกา Subaru ซึ่งจะถูกกล่าวถึงด้านล่างสามารถซื้อได้ด้วยกล่องคู่มือ แต่ความต้องการใช้โดย Automata ประการที่สองในรถยนต์ทั้งสามตัวขับเคลื่อนสี่ล้อในโหมดใด ๆ ทำงานราวกับว่าด้วยตัวเองโดยไม่ต้องใช้ไดรฟ์ที่ไม่จำเป็นจากไดรเวอร์
นั่งและเป็นผู้นำ ในการทดสอบของเราเยี่ยมชมออดี้ A6 กับมอเตอร์ 2.4 ลิตรและกล่องเกียร์แบบแมนนวล ในกรณีนี้มันไม่สำคัญว่า Mercedes และ Subaru ติดตั้ง Automata ตามอัตโนมัติของ Autopilot ความบริสุทธิ์ของการทดลองถูกสังเกตอย่างเต็มที่ ครั้งแรก Mercedes 4matic จะดำเนินการเกือบเฉพาะกับการส่งสัญญาณอัตโนมัติในการเชื่อมต่อกับการปฐมนิเทศกับตลาดอเมริกา Subaru ซึ่งจะถูกกล่าวถึงด้านล่างสามารถซื้อได้ด้วยกล่องคู่มือ แต่ความต้องการใช้โดย Automata ประการที่สองในรถยนต์ทั้งสามตัวขับเคลื่อนสี่ล้อในโหมดใด ๆ ทำงานราวกับว่าด้วยตัวเองโดยไม่ต้องใช้ไดรฟ์ที่ไม่จำเป็นจากไดรเวอร์ ดังนั้นออดี้ A6 Quattro เครื่องมือที่สมดุลที่สุดปราศจากอคติของฟอริดไซด์ด้านหน้าหรือไดรฟ์หลัง คนเดียวที่อยู่บนยางทางหลวงที่เรียบง่ายและในเวลาเดียวกันไม่ได้ยกเลิกแผ่นป้าย Quattro ด้วยการเริ่มต้นที่คมชัดจากสถานที่เขารีบวิ่งเข้าไปในระยะที่หิมะตกอย่างมั่นใจแม้แต่พยายามที่จะลงจากหลักสูตรที่กำหนดโดยคนขับ เมื่อหนึ่งหรือสองล้อตกลงมาบนไอศกรีมน้ำแข็งก็เพียงพอที่จะแก้ไขทิศทางการขับขี่ - ไม่ใช่ความปรารถนาเพียงเล็กน้อยที่จะบุกเข้าไปในลื่นไถล!
ตามพฤติกรรมของเขานี่เป็นรถที่คาดการณ์ไว้มากที่สุดจากทั้งหมดของ Trinity: เขาเป็นเพียงแค่และไม่มีการคิดไปที่นั่นซึ่งเจ้าของของเขาต้องการ
กิ้งก่า แบรนด์ Subaru ในชีวิตเกี่ยวข้องกับผู้ที่มีไดรฟ์เต็มรูปแบบ และมีคนเพียงไม่กี่คนที่คิดว่าวิศวกรของ บริษัท วางหลักการที่แตกต่างจาก Mercedes หรือ Audi ในรากฐาน การกระจายแรงบิดระหว่างขวานใน Subaru นั้นเป็นระบบที่ปรับให้เข้ากับสภาพถนนโดยอัตโนมัติ
เราที่การกำจัดของเราเป็นซีดานมรดกที่มีการส่งผ่านอัตโนมัติ ในบรรยากาศถนนปกติบนยางมะตอยแห้ง 90 เปอร์เซ็นต์ของแรงบิดถูกส่งไปยังล้อหน้า ในกรณีที่ลื่นไถลของพวกเขาแรงบิดถูกแจกจ่ายต่ออัตราส่วน 50:50
สิ่งนี้เป็นไปได้เนื่องจากการใช้การมีเพศสัมพันธ์แบบพิเศษในกระปุกเกียร์ที่ทำงานบนหลักการของคลัทช์ทั่วไป เฉพาะในนั้นไม่ใช่ดิสก์เดียว แต่เป็นจำนวนมาก และแรงเสียดทานการทำลายล้างสำหรับคลัตช์ใด ๆ Subaru เพื่อประโยชน์ ในล้อทุกรุ่นมรดกมีความปลอดภัยเซ็นเซอร์พิเศษที่ติดตามความเร็วของการหมุนของแกนรถยนต์ ทันทีที่มันเพิ่มขึ้น - นั่นคือในขณะที่สลิปที่ใช้งานอยู่ - เซ็นเซอร์จะส่งสัญญาณไปยังไดรฟ์ไฮดรอลิกซึ่งเริ่มกดแผ่นคลัตช์ได้อย่างราบรื่นเพิ่มคลัตช์ของแผ่นดิสก์ ส่วนหนึ่งของความพยายาม tractive นั้นถูกเลือกจากเพลาหน้าและถูกส่งไปยังล้อหลัง
ในรถยนต์ที่มีเกียร์ธรรมดาที่ Hydromefta เล่นโดยเคานท์ ความแตกต่างของมันอยู่ในตัวตนของไดรฟ์ไฮดรอลิ ดิสก์จะหมุนเพียงในของเหลวพิเศษซึ่งมีการเพิ่มแรงเสียดทาน (ในขณะที่ใบ) เริ่มต้นไปอย่างแข็งขันหนา คลัทช์ของดิสก์เพิ่มขึ้นและความพยายามฉุดจะแจกจ่ายในความโปรดปรานของล้อที่มีด้ามจับที่ดีกว่าที่มีราคาแพง ระบบนี้เป็นระบบที่เชื่อถือได้เวลาทดสอบ แต่ผลงานที่มีความล่าช้าขนาดเล็กซึ่งแตกต่างจากการมีเพศสัมพันธ์ hydromechanical เกียร์อัตโนมัติ LEGACY ให้ตำแหน่ง L หมายถึงเกียร์ลดลง เมื่อมีการเปิดใช้แรงฉุดส่งจากมอเตอร์บนล้อที่เพิ่มขึ้นประมาณหนึ่งเท่าครึ่ง ในรุ่นที่มีกล่องคู่มือการเปลี่ยนเกียร์ด้วยตนเองเพื่อให้บริการลดลง
GTO iconist ที่มีระดับต่ำของมันค่อนข้างสองของคู่แข่ง, ค่าของซูบารุเลกาซีเปิดออกมาเป็นพอมากที่สุดจากทั้งหมดผ่านและยินดีกับเราด้วยตัวอักษรกีฬาจริง ใช่กับการเริ่มต้นที่คมชัดจากสถานที่บนยางมะตอยปกคลุมด้วยน้ำแข็งโจ๊กพฤติกรรมในครั้งแรกที่สอง - ตรงไปตรงมาขับเคลื่อนล้อหน้า วิถีการเริ่มต้นมีพวงมาลัยแก้ไขเล็ก ๆ น้อย ๆ แต่ในการแข่งขันบนหิมะปกคลุมสนาม Khodajan ความรู้สึกนี้จะหายไปอย่างสมบูรณ์ นอกจากนี้ยังมีการขว้างปารถคันนี้ตามคำขอของช่างภาพไปที่ธนาคารเปิดออกมาเป็นครั้งแรกไม่ง่ายดังนั้น มรดกตกลงที่จะแสดงให้เห็นถึงการลื่นไถลที่ใช้งานเท่านั้นในขณะที่ทำงานพร้อมกันล้อและในเวลาเดียวกันก๊าซธรรมชาติก๊าซธรรมชาติก๊าซ ตัวละครสปอร์ตนี้
ดังนั้นในไดรฟ์เต็มล้อ sedann คุณควรที่ดินไม่บริสุทธิ์พิชิต ขับเคลื่อนสี่ล้อบนรถโดยสาร - ระบบที่มีความซับซ้อนมากขึ้นและดังนั้นจึงมีราคาแพงกว่าในการบำรุงรักษาและการซ่อมแซม ประการที่สามการขับเคลื่อนสี่ล้อเป็นตัวเลือกที่สมบูรณ์แบบสำหรับคนขับรถที่มีความทะเยอทะยานที่ต้องการมีรถชั้นธุรกิจ แต่ไม่ได้ขึ้นอยู่กับการแปรเปลี่ยนของสภาพอากาศในเมืองและเพลิดเพลินไปกับการขับรถทุกวัน
ข้อความ Nikolay Sukhov ภาพ Alexey Ilyin
แหล่งที่มา: "Autopilot"






