Test Drive Audi A4 B6 2001 - 2004 Sedan





Berapa banyak pemimpin yang Anda butuhkan?
Empat lebih baik dari dua - begitu?Lahir untuk reli trek, semua mobil -mobil drive segera mencapai jalan sipil. Keberhasilan olahraga adalah salah satu katalis konsumen terbaik. Tapi, seperti biasa, semakin fasih argumen untuk, semakin banyak keraguan. Untuk melakukan percobaan murni, tidak ada cukup sepele - dua mobil identik dengan jenis drive yang berbeda. Kalau tidak, setelah semua, bukan konsep dibandingkan, tetapi contoh nyata dari perwujudan mereka (lihat Zr, 1999, No. 5), yang sama sekali tidak sama.
Dari Surga ke Bumi
 Jadi, kami memiliki dua mobil yang hampir identik. Audi A4 Avan dengan mesin 1.8T dan gearbox mekanik. Seluruh perbedaan warna, papan nama kecil quattro pada salah satu mobil dan, tentu saja, penggerak empat roda. Pada distribusi Audi-Kvattro torsi antara gandar depan dan belakang, diferensial cacing dari peningkatan gesekan Torsen, yang tidak dihubungkan oleh ikatan elektronik, secara tradisional kepala. Prinsip karyanya sudah jelas dari namanya - jika, tentu saja, untuk mengetahui bahwa Torsen bukan nama keluarga Swedia, tetapi singkatan Inggris dari torsi dan sensitif (secara harfiah sensitif terhadap torsi). Berkat dia, upaya motor tidak menghilang pada roda selip, dan pada saat yang sama cukup fleksibel untuk mendistribusikan kembali momen itu, melacak perubahan dalam adhesi ban dengan jalan. Diferensial Interdaemoral dalam transmisi Audi - Kontribusi Gratis dan Tambahan untuk Kontrolabilitas tidak berhasil.
Jadi, kami memiliki dua mobil yang hampir identik. Audi A4 Avan dengan mesin 1.8T dan gearbox mekanik. Seluruh perbedaan warna, papan nama kecil quattro pada salah satu mobil dan, tentu saja, penggerak empat roda. Pada distribusi Audi-Kvattro torsi antara gandar depan dan belakang, diferensial cacing dari peningkatan gesekan Torsen, yang tidak dihubungkan oleh ikatan elektronik, secara tradisional kepala. Prinsip karyanya sudah jelas dari namanya - jika, tentu saja, untuk mengetahui bahwa Torsen bukan nama keluarga Swedia, tetapi singkatan Inggris dari torsi dan sensitif (secara harfiah sensitif terhadap torsi). Berkat dia, upaya motor tidak menghilang pada roda selip, dan pada saat yang sama cukup fleksibel untuk mendistribusikan kembali momen itu, melacak perubahan dalam adhesi ban dengan jalan. Diferensial Interdaemoral dalam transmisi Audi - Kontribusi Gratis dan Tambahan untuk Kontrolabilitas tidak berhasil.  Berapa berat 4x4 - dalam pengertian literal dan figuratif? Menurut dimensi kami, Audi A4 Avan dengan Quattro schildik lebih berat dari rekan depan -drive 78 kg. Menurut spesifikasi pabrik, perbedaannya adalah 85 kg - kami menuliskannya ke volume tangki yang berbeda, kesalahan pengukuran yang berhasil menempel kotoran domestik. Nah, menurut dealer Audi resmi, versi cvatro lebih sulit untuk ... 3390 euro. Avan 1.8T dasar biaya 30.650 euro, kvattro - 34 040. Kilogram drive semua -roda diperkirakan 43 euro - yah, mekanik Jerman tidak pernah murah.
Berapa berat 4x4 - dalam pengertian literal dan figuratif? Menurut dimensi kami, Audi A4 Avan dengan Quattro schildik lebih berat dari rekan depan -drive 78 kg. Menurut spesifikasi pabrik, perbedaannya adalah 85 kg - kami menuliskannya ke volume tangki yang berbeda, kesalahan pengukuran yang berhasil menempel kotoran domestik. Nah, menurut dealer Audi resmi, versi cvatro lebih sulit untuk ... 3390 euro. Avan 1.8T dasar biaya 30.650 euro, kvattro - 34 040. Kilogram drive semua -roda diperkirakan 43 euro - yah, mekanik Jerman tidak pernah murah. Sebenarnya, apa keuntungan dari semua -wheel drive? Yang paling penting - torsi mesin didistribusikan ke semua roda, sehingga seluruh massa mesin terlibat dalam menciptakan gaya traksi. Dengan kata lain, berat kopling mobil penggerak semua -roda sama dengan beratnya, dan bukan setengah atau bahkan 60%. Secara alami, di jalan yang licin, ini memberikan manfaat yang cukup besar. Mari kita coba mengevaluasinya.
Hanya gunung yang bisa lebih baik dari gunung
 Kenaikan curam di jalan -jalan kebijakan mobil Dmitrovsky dipenuhi salju segar dalam kedalaman setengah meter, tetapi 12 dan 16% cukup mudah diakses oleh kami. Salju basah yang digulung pada suhu sekitar 0c langsung berubah di bawah roda menjadi es halus. Bahkan ban musim dingin yang asli, lapisan seperti itu tidak ada pada gigi - gas yang ditambahkan secara tidak sengaja, dan Audi drive depan -roda tidak dapat bergerak pada pendakian yang lebih kecil. Namun, dengan bekerja secara akurat dengan kopling dan gas, latihan ini cukup mampu menjadi pengemudi kualifikasi menengah. Tetapi kebangkitan 16% menetapkan nilai yang sama sekali berbeda - jika audi dengan quattro nameplate dengan percaya diri bergerak dan mempercepat, maka masih harus diputar tanpa daya dengan roda - lift seperti itu hanya dikenakan dari overclocking.
Kenaikan curam di jalan -jalan kebijakan mobil Dmitrovsky dipenuhi salju segar dalam kedalaman setengah meter, tetapi 12 dan 16% cukup mudah diakses oleh kami. Salju basah yang digulung pada suhu sekitar 0c langsung berubah di bawah roda menjadi es halus. Bahkan ban musim dingin yang asli, lapisan seperti itu tidak ada pada gigi - gas yang ditambahkan secara tidak sengaja, dan Audi drive depan -roda tidak dapat bergerak pada pendakian yang lebih kecil. Namun, dengan bekerja secara akurat dengan kopling dan gas, latihan ini cukup mampu menjadi pengemudi kualifikasi menengah. Tetapi kebangkitan 16% menetapkan nilai yang sama sekali berbeda - jika audi dengan quattro nameplate dengan percaya diri bergerak dan mempercepat, maka masih harus diputar tanpa daya dengan roda - lift seperti itu hanya dikenakan dari overclocking. Percepatan, lebih banyak percepatan
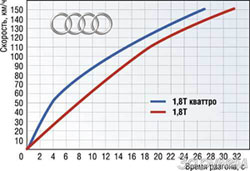 Seberapa jauh lebih efektif mobil roda -drive yang dipercepat di sepanjang jalan yang licin? Pada salju yang digulung (lihat tabel dan grafik) hingga 40 km/jam Audi A4 Avan Croatro kira -kira dua kali lipat dari drive rheel depan, dan meningkatkan keuntungan sekitar 80 km/jam. Di atas, dinamika terbatas pada tenaga mesin, dan bukan dengan parameter adhesi, jadi setelah 100 km/jam keuntungan drive rheel penuh untuk mesin dengan daya spesifik sekitar 100 liter. S./t hilang. Namun, ini hanya berlaku untuk salju yang digulung dengan koefisien kopling 0,3-0,4. Semakin licin lapisannya, semakin tinggi ambang batas ini.
Seberapa jauh lebih efektif mobil roda -drive yang dipercepat di sepanjang jalan yang licin? Pada salju yang digulung (lihat tabel dan grafik) hingga 40 km/jam Audi A4 Avan Croatro kira -kira dua kali lipat dari drive rheel depan, dan meningkatkan keuntungan sekitar 80 km/jam. Di atas, dinamika terbatas pada tenaga mesin, dan bukan dengan parameter adhesi, jadi setelah 100 km/jam keuntungan drive rheel penuh untuk mesin dengan daya spesifik sekitar 100 liter. S./t hilang. Namun, ini hanya berlaku untuk salju yang digulung dengan koefisien kopling 0,3-0,4. Semakin licin lapisannya, semakin tinggi ambang batas ini.  Namun jawabannya sama sekali tidak sederhana. Ini semua tentang sistem stabilisasi ESP. Audi hanya menyediakan dua mode karyanya - baik kontrol penuh mobil, termasuk traksi pada roda, atau ketidakhadirannya yang lengkap. Dapatkah pengemudi yang berpengalaman mengalahkan otomatisasi selama akselerasi? Jawaban kami adalah afirmatif. Selain itu, dengan mobil dengan sepasang memimpin, keuntungannya sangat berat - lebih dari tiga detik dalam percepatan hingga 100 km/jam. All -Wheel Drive jauh lebih beku, tetapi di sini seseorang mempertahankan posisi terdepan. Meskipun tidak begitu meyakinkan: 0,5-0,6 C hingga 100 km/jam.
Namun jawabannya sama sekali tidak sederhana. Ini semua tentang sistem stabilisasi ESP. Audi hanya menyediakan dua mode karyanya - baik kontrol penuh mobil, termasuk traksi pada roda, atau ketidakhadirannya yang lengkap. Dapatkah pengemudi yang berpengalaman mengalahkan otomatisasi selama akselerasi? Jawaban kami adalah afirmatif. Selain itu, dengan mobil dengan sepasang memimpin, keuntungannya sangat berat - lebih dari tiga detik dalam percepatan hingga 100 km/jam. All -Wheel Drive jauh lebih beku, tetapi di sini seseorang mempertahankan posisi terdepan. Meskipun tidak begitu meyakinkan: 0,5-0,6 C hingga 100 km/jam. Namun, dalam kegagalan elektronik, tidak hanya mereka yang menyusun program ESP, tetapi juga karakteristik mesin Boost 1.8T bersalah. Jika intervensi ESP mencekik mesin di bawah 1.500 rpm, maka akan membutuhkan waktu untuk datang ke mode operasi, ketika turbocharger akan menghidupkannya kembali. Tanpa ragu, dengan mesin atmosfer, kehilangan ESP tidak akan terlihat.
Hasil terburuk dalam akselerasi diperoleh tepat ketika pengemudi membantu sistem, mengambil pedal gas dengan peningkatan tergelincir. Kesimpulannya tegas - perlu untuk mempercayai elektronik, bahkan jika refleks biasa dan pengalaman pengemudi menentukan sebaliknya.
Bersama atau sebaliknya?
 Mengapa kami sangat memperhatikan percepatan? Ya, karena dialah yang menentukan keuntungan dari mobil penggerak semua -roda di jalan raya yang berliku. Kecepatan gerakan dalam busur dibatasi oleh koefisien pegangan ban - bahkan lebih cepat, dan mobil tidak akan bertahan pada lintasan, apakah ia memiliki empat atau dua roda terkemuka. Ya, tentu saja, mobil dengan satu sumbu terkemuka harus lebih sensitif untuk mengubah dorongan pada roda atau mengemudi. Faktanya, Audi A4 Avan Croatro, jelas lebih stabil dalam garis lurus, ternyata lebih gugup dalam tikungan yang membatasi, dengan tajam melemparkan pakan untuk pelepasan gas. Namun, orang yang mengharapkan reaksi seperti itu tidak akan mengejutkan. Selain itu, tidak adanya gandar belakang mudah diubah menjadi meluncur dengan keempat roda, memungkinkan ...
Mengapa kami sangat memperhatikan percepatan? Ya, karena dialah yang menentukan keuntungan dari mobil penggerak semua -roda di jalan raya yang berliku. Kecepatan gerakan dalam busur dibatasi oleh koefisien pegangan ban - bahkan lebih cepat, dan mobil tidak akan bertahan pada lintasan, apakah ia memiliki empat atau dua roda terkemuka. Ya, tentu saja, mobil dengan satu sumbu terkemuka harus lebih sensitif untuk mengubah dorongan pada roda atau mengemudi. Faktanya, Audi A4 Avan Croatro, jelas lebih stabil dalam garis lurus, ternyata lebih gugup dalam tikungan yang membatasi, dengan tajam melemparkan pakan untuk pelepasan gas. Namun, orang yang mengharapkan reaksi seperti itu tidak akan mengejutkan. Selain itu, tidak adanya gandar belakang mudah diubah menjadi meluncur dengan keempat roda, memungkinkan ...  Itu benar, untuk mulai berakselerasi jauh sebelum meninggalkan giliran, dengan demikian memenangkan sepersekian detik. Dan di jalur cincin berliku, mereka mengembangkan sekitar 4 detik keunggulan di atas mobil drive roda depan. Ini adalah ahli - pengemudi yang hanya memiliki keterampilan dasar dalam mengelola mesin drive semua -wheel, kemenangannya dua kali lebih sederhana. Dan pengemudi biasa tetap ada (dalam skenario terbaik) dalam dirinya sendiri. Di roda Audi drive depan -roda di jalan raya berliku yang berliku, pengemudi lebih tegang, lebih sering menyesuaikan lintasan dan membuat gerakan dengan roda kemudi dengan amplitudo yang lebih besar. Kontrol semua -wheel drive, pada pandangan pertama, membutuhkan lebih sedikit usaha. Namun, dengan kesalahan dalam memilih lintasan, koreksi cepat roda kemudi dengan sudut rotasi yang signifikan akan diperlukan. Kami telah mencatat fitur Audi Avvan Avan Kvattro ini (Zr, 2003, No. 1).
Itu benar, untuk mulai berakselerasi jauh sebelum meninggalkan giliran, dengan demikian memenangkan sepersekian detik. Dan di jalur cincin berliku, mereka mengembangkan sekitar 4 detik keunggulan di atas mobil drive roda depan. Ini adalah ahli - pengemudi yang hanya memiliki keterampilan dasar dalam mengelola mesin drive semua -wheel, kemenangannya dua kali lebih sederhana. Dan pengemudi biasa tetap ada (dalam skenario terbaik) dalam dirinya sendiri. Di roda Audi drive depan -roda di jalan raya berliku yang berliku, pengemudi lebih tegang, lebih sering menyesuaikan lintasan dan membuat gerakan dengan roda kemudi dengan amplitudo yang lebih besar. Kontrol semua -wheel drive, pada pandangan pertama, membutuhkan lebih sedikit usaha. Namun, dengan kesalahan dalam memilih lintasan, koreksi cepat roda kemudi dengan sudut rotasi yang signifikan akan diperlukan. Kami telah mencatat fitur Audi Avvan Avan Kvattro ini (Zr, 2003, No. 1). Sistem stabilisasi akan menyamakan hasil driver dari berbagai kualifikasi. Ingatlah bahwa ESP saat ini pada kedua versi Audi tidak dapat secara memadai memahami geser dengan keempatnya - ia berupaya memaksa mobil untuk bergerak ke arah yang ditetapkan oleh gandar depan, dan demi ini menghilangkan kelebihannya, dalam pendapatnya, dorong. Ngomong -ngomong, menurut pengamatan kami, intervensi ESP pada semua -wheel drive Audi jauh lebih tidak terlihat. Alasannya jelas - keempat roda terkemuka tergelincir jauh lebih jarang daripada dua, dan karena itu ESP tidak mengepung mesin sekali lagi.
Ada pendapat
 Mereka menafsirkan tentang moral berbahaya dari semua mobil drive roda. Katakan, sampai titik tertentu, semuanya baik -baik saja, dan kemudian ... Kemungkinan besar, ketidakpercayaan muncul karena kesalahan khas: pintu masuk ke belokan pada kecepatan tinggi, terlalu banyak sudut rotasi roda kemudi, skidding dan kehilangan kontrol di atas mobil ... ya, stabilitas untuk menipu langsung - bahkan dalam percobaan kami, pengemudi biasa, melintasi semua -roda drive audi, mulai berkendara ke belokan lebih cepat, dan itu tidak siap untuk reaksi mobil terhadap ini ... ESP tiba tepat waktu - namun, untuk situasi seperti itulah yang dikandung.
Mereka menafsirkan tentang moral berbahaya dari semua mobil drive roda. Katakan, sampai titik tertentu, semuanya baik -baik saja, dan kemudian ... Kemungkinan besar, ketidakpercayaan muncul karena kesalahan khas: pintu masuk ke belokan pada kecepatan tinggi, terlalu banyak sudut rotasi roda kemudi, skidding dan kehilangan kontrol di atas mobil ... ya, stabilitas untuk menipu langsung - bahkan dalam percobaan kami, pengemudi biasa, melintasi semua -roda drive audi, mulai berkendara ke belokan lebih cepat, dan itu tidak siap untuk reaksi mobil terhadap ini ... ESP tiba tepat waktu - namun, untuk situasi seperti itulah yang dikandung. Penilaian lain dikonfirmasi dengan suara bulat: mobil all -wheel drive secara subyektif lebih berat saat bepergian. Namun, tidak hanya secara subyektif: untuk periode tes, mobil drive roda depan berjalan sekitar 10% lebih sedikit dalam kondisi yang sama dalam kondisi yang sama.
SALJU TURUN...
 Tidak peduli bagaimana produsen mengatakan bahwa mereka membuat semua mobil drive roda sama sekali tidak demi meningkatnya paten, masih berusaha untuk memeriksa. Kami tidak bisa menolak dan, karena, situs di ujung jalan dinamometrik ditutupi dengan lapisan salju setebal sekitar 20 cm. Bahkan Audi A4 mengatasinya dengan kesulitan besar - yang tidak mengherankan dengan lumen jalan 130 mm. Fellow Front -Wheel Drive -nya dapat memasuki target salju hanya dengan akselerasi kecil dan maju setengah jarak. Namun, secara berkala menyerahkan kembali dan menabrak kebiasaan, keduanya mampu bergerak maju dengan lumayan. Jadi tanpa izin jalan yang tepat, tidak perlu membicarakan semua kualitas lereng.
Tidak peduli bagaimana produsen mengatakan bahwa mereka membuat semua mobil drive roda sama sekali tidak demi meningkatnya paten, masih berusaha untuk memeriksa. Kami tidak bisa menolak dan, karena, situs di ujung jalan dinamometrik ditutupi dengan lapisan salju setebal sekitar 20 cm. Bahkan Audi A4 mengatasinya dengan kesulitan besar - yang tidak mengherankan dengan lumen jalan 130 mm. Fellow Front -Wheel Drive -nya dapat memasuki target salju hanya dengan akselerasi kecil dan maju setengah jarak. Namun, secara berkala menyerahkan kembali dan menabrak kebiasaan, keduanya mampu bergerak maju dengan lumayan. Jadi tanpa izin jalan yang tepat, tidak perlu membicarakan semua kualitas lereng. Namun: untuk atau melawan?
Jangan menunggu jawaban yang pasti. Pertama, manfaat dari all-wheel drive berbanding lurus dengan kekuatan spesifik. Dengan kata lain, pada profikasi rendah 70 -horsepower, ia hampir tidak menunjukkan dirinya dari sisi terbaik (pengecualian langka adalah serangan terhadap naik es). Kedua, sistem ESP modern belum dapat menggunakan keuntungan dari all-wheel drive. Ketiga, hanya pengemudi yang disiapkan yang dapat menerapkan banyak kemungkinan mobil semacam itu.
 Dan sebagai hasil? Jika mobil hanya sarana untuk pengiriman dari titik A ke titik B, dan pengalaman dan pengalaman pengemudi kecil, maka, mungkin, Anda tidak boleh memperhatikan semua -rheel drive modifikasi. Ini masih bukan kendaraan yang semuanya, tetapi uang yang dihemat akan cukup untuk setidaknya liburan yang apik untuk seluruh keluarga ...
Dan sebagai hasil? Jika mobil hanya sarana untuk pengiriman dari titik A ke titik B, dan pengalaman dan pengalaman pengemudi kecil, maka, mungkin, Anda tidak boleh memperhatikan semua -rheel drive modifikasi. Ini masih bukan kendaraan yang semuanya, tetapi uang yang dihemat akan cukup untuk setidaknya liburan yang apik untuk seluruh keluarga ... Ini adalah masalah lain ketika mobil tidak hanya transportasi, tetapi juga hobi dan hobi. Jika Anda tidak menyisihkan dana untuk peningkatan Anda sebagai pengemudi dan ingin menikmati peluang baru. Dalam hal ini, tidak ada alternatif untuk drive lengkap.
Front -Wheel Drive - perlu untuk memperbaiki lintasan dengan roda kemudi.
Full -Wheel Drive adalah belokan dengan meluncur dengan keempat roda.
Di salju yang dalam, keuntungan dari mobil penggerak semua -roda sangat terlihat.
Situs fraktur menunjukkan penghentian tergelincir roda. Data tentang upaya terbaik untuk berakselerasi tanpa ESP.
Teks / anatoly fomin
Foto / George Sadkov
Sumber: Majalah "mengemudi"
Tes video drive Audi A4 B6 2001 - 2004

Tes Kecelakaan Video Audi A4 B6 2001 - 2004


Test Drive Audi A4 B6 2001 - 2004



Tes Crash Audi A4 B6 2001 - 2004
Tes Krassh: Informasi terperinci30%
Pengemudi dan penumpang
7%
Pejalan kaki


Malfunctions Audi A4 B6 2001 - 2004
Audi A4 Malfunctions: Informasi Detail| A4 B6 2001 - 2004 | |
|---|---|
| Mesin |  |
| Penularan | |
| Sistem kontrol dan suspensi |  |
| Sistem rem | |
| Pemanas udara dan pendingin udara | |
| Sistem peluncuran dan pengisian | |
| Komponen listrik dan sebagainya |  |
| Stabilitas tubuh korosi |