ทดสอบไดรฟ์ Mercedes Benz E-Class W212 2013-NV Sedan





ฉันไม่อ้วนฉันเต็ม!
 แม้แต่เด็กก็จะไปขี่จักรยานสามล้อ เด็กชายผู้ใหญ่ขี่สองล้อและป้าในคณะละครสัตว์ - อยู่บนล้อเดียวแล้ว ทำไมต้องทำรถซีดานขับเคลื่อนทั้งหมด?
แม้แต่เด็กก็จะไปขี่จักรยานสามล้อ เด็กชายผู้ใหญ่ขี่สองล้อและป้าในคณะละครสัตว์ - อยู่บนล้อเดียวแล้ว ทำไมต้องทำรถซีดานขับเคลื่อนทั้งหมด? ในช่วงวัยแรกรุ่นพวกเขาถูกวัดซึ่งเขียนอยู่เหนือกำแพง การได้รับประสบการณ์ชีวิตและทำให้แน่ใจว่าไม่ว่าจะเป็นผลลัพธ์ที่ว่าสเปรย์ก็บินได้อย่างเท่าเทียมกันย้ายไปที่เรื่องที่สูงขึ้น ตัวอย่างเช่นใครขับรถให้ดีขึ้น ข้อพิพาททุกอย่างหลีกเลี่ยงไม่ได้ในการอภิปรายเกี่ยวกับไดรฟ์ที่ดีกว่า - ด้านหน้าหรือด้านหลัง และมีเพียงไม่กี่เจ้าของรถซีดานขับเคลื่อนทุกล้อเท่านั้นที่ฟังข้อพิพาทเหล่านี้ด้วยรอยยิ้มที่เกิดขึ้น พวกเขารู้ว่าไดรฟ์ที่ดีที่สุดคือด้านหน้าและด้านหลังในเวลาเดียวกัน
 ก้าวข้ามเส้น และอย่างจริงจังรถยนต์ขับเคลื่อนทุกล้อเข้าสู่ชีวิตประจำวันจากการแข่งแคทวอล์ค ในชีวิตจริงพวกเขาสามารถให้ความสนใจกับคนที่ชอบขี่ได้เท่านั้น แม่นยำยิ่งขึ้นผู้ดำเนินงานรถยนต์โดยไม่คำนึงถึงปี: ฝนหิมะสิ่งสกปรกหรือน้ำแข็ง บนแอสฟัลต์แห้งและที่อารมณ์เฉลี่ยของคนขับไม่จำเป็นต้องใช้ไดรฟ์ทั้งหมด คนขับรถเช่นนี้จะไม่รู้สึก
ก้าวข้ามเส้น และอย่างจริงจังรถยนต์ขับเคลื่อนทุกล้อเข้าสู่ชีวิตประจำวันจากการแข่งแคทวอล์ค ในชีวิตจริงพวกเขาสามารถให้ความสนใจกับคนที่ชอบขี่ได้เท่านั้น แม่นยำยิ่งขึ้นผู้ดำเนินงานรถยนต์โดยไม่คำนึงถึงปี: ฝนหิมะสิ่งสกปรกหรือน้ำแข็ง บนแอสฟัลต์แห้งและที่อารมณ์เฉลี่ยของคนขับไม่จำเป็นต้องใช้ไดรฟ์ทั้งหมด คนขับรถเช่นนี้จะไม่รู้สึก ผู้ผลิตตัวเลือกการขับเคลื่อนล้อทั้งหมดสำหรับรถซีดานและรถเกวียนยอดนิยมไม่คาดหวังว่าเจ้าของของพวกเขาจะใช้ Mercedes 4Matic หรือ Golf 4Motion เป็นรถจี๊ปในประเทศที่แตกสลาย ค่าสูงสุดที่เจ้าของซีดานขับเคลื่อนทุกล้อสามารถไว้วางใจได้และนี่คือความแตกต่างของเขาในการแจ้งเตือนและมนุษย์สามัญเพิ่มโอกาสในการออกจากสนามหิมะในตอนเช้าหรือไปที่กระท่อมฤดูร้อนในฤดูใบไม้ร่วง การละลายดินในฤดูใบไม้ผลิ
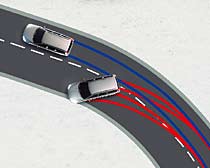
 นักออกแบบติดตั้งไดรฟ์ทุกล้อบนรถยนต์เพื่อให้เจ้าของของพวกเขารู้สึกมั่นใจมากขึ้นในสภาพถนนที่ยากลำบากบนถนนที่เต็มไปด้วยหิมะบนภูเขาบนแอสฟัลต์เปียก แม้แต่คนขับมือใหม่ก็รู้วิธีที่จะทำลายการพังทลายของรถในการลื่นไถลเช่นเมื่อผ่านการเลี้ยวที่สูงชัน
นักออกแบบติดตั้งไดรฟ์ทุกล้อบนรถยนต์เพื่อให้เจ้าของของพวกเขารู้สึกมั่นใจมากขึ้นในสภาพถนนที่ยากลำบากบนถนนที่เต็มไปด้วยหิมะบนภูเขาบนแอสฟัลต์เปียก แม้แต่คนขับมือใหม่ก็รู้วิธีที่จะทำลายการพังทลายของรถในการลื่นไถลเช่นเมื่อผ่านการเลี้ยวที่สูงชัน แกนด้านหลังของรถพยายามอย่างต่อเนื่องที่จะหลุดออกจากการเลี้ยว - หากกระบวนการนี้ไม่ได้ควบคุมแล้วรถก็เริ่มหมุนรอบแกนของมัน เป็นที่ทราบกันดีว่ามีกฎบางอย่างสำหรับการถอนรถออกจากดริฟท์ที่มีความเฉพาะเจาะจงกับด้านหน้าและด้านหลังขับเคลื่อนล้อ แต่สถิติยังระบุว่าบ่อยครั้งที่ผู้คนตกอยู่ในอุบัติเหตุ ไดรฟ์และในทางกลับกัน
รถขับเคลื่อนแบบเต็มล้อนั้นมีความเป็นประชาธิปไตยมากขึ้นในพฤติกรรมของพวกเขาและมักจะอนุญาตให้เจ้าของของพวกเขาข้ามใบหน้าของสิ่งที่ได้รับอนุญาตเพียงเล็กน้อย: รีบไปตามถนนที่ใกล้จะทำผิดกติกา ขีด จำกัด ของความเร็วที่อนุญาตเมื่อผ่านการเลี้ยวจะสูงขึ้นมาก ดังนั้นไดรฟ์ทั้งหมดยังคงเป็นความเร็วและอะดรีนาลีน
 ค่าธรรมเนียมสำหรับความเสี่ยง อย่าประจบประแจงตัวเองด้วยการปรากฏตัวของ 4x4 หรือ 4wds บนรถยนต์ดังกล่าวจำไว้ว่าครั้งเดียวและสำหรับทั้งหมด - สิ่งเหล่านี้ไม่ใช่ SUV ตามกฎแล้วเอกสารแจกที่มีการลดลงใกล้เคียงไม่ได้ติดตั้งบนรถซีดานไดรฟ์ทุกล้อ สิ่งเหล่านี้ยังคงเป็นรถยนต์สำหรับถนนสาธารณะ แต่มักจะมีราคาแพงกว่าคู่ขับเคลื่อนล้อเดียวของพวกเขา
ค่าธรรมเนียมสำหรับความเสี่ยง อย่าประจบประแจงตัวเองด้วยการปรากฏตัวของ 4x4 หรือ 4wds บนรถยนต์ดังกล่าวจำไว้ว่าครั้งเดียวและสำหรับทั้งหมด - สิ่งเหล่านี้ไม่ใช่ SUV ตามกฎแล้วเอกสารแจกที่มีการลดลงใกล้เคียงไม่ได้ติดตั้งบนรถซีดานไดรฟ์ทุกล้อ สิ่งเหล่านี้ยังคงเป็นรถยนต์สำหรับถนนสาธารณะ แต่มักจะมีราคาแพงกว่าคู่ขับเคลื่อนล้อเดียวของพวกเขา เราได้เลือกรถซีดานชั้นธุรกิจสามตัวสำหรับการทดสอบของเรา Mercedes E-Klasse 280 4Matic (ความแตกต่างของราคาด้วยตาปกติคือประมาณ $ 4.5,000), Audi A6 2.4 Quattro (ความแตกต่าง-$ 4,000) และ Subaru Legacy 2.5 รถยนต์มีราคาแตกต่างกัน แต่คล้ายกันในหลักการและอุดมการณ์
ตัวเลือกค่อนข้างเป็นส่วนตัว - รถซีดานแฮทช์แบ็กและเกวียนสถานีทั้งหมดเกียร์ขับเคลื่อนล้อทำโดยหลาย บริษัท สิ่งเหล่านี้ส่วนใหญ่เป็น Universals (Volvo, VW, Mitsubishi) แต่ตามกฎแล้วแตกต่างจากรุ่นง่ายที่มีการกวาดล้างที่สูงขึ้น
นอกจากนี้ยังมีรถสปอร์ตที่เน้น - VW Golf และ Bora, Subaru Impreza บนแนวทางของ Volvo S60 ในรถยนต์ดังกล่าวไดรฟ์ทุกล้อเป็นเครื่องบรรณาการให้กับแฟชั่นกีฬา แต่หลักการที่วางไว้ในการออกแบบของพวกเขาไม่เปลี่ยนแปลง - มันจะถูกกล่าวถึง
 Good Gelding ระบบขับเคลื่อนทุกล้อของเมอร์เซเดสได้รับผลกระทบเป็นหลักจากปรัชญาของ บริษัท-ซีดานเมอร์เซเดสคลาสสิกควรเป็นไดรฟ์ล้อหลัง ดังนั้นแรงบิดจะถูกกระจายระหว่างล้อหน้าและล้อหลังในอัตราส่วน 35:65 เปอร์เซ็นต์ อัตราส่วนนี้อยู่ตลอดเวลาและไม่เคยเปลี่ยนแปลง การกระจายความพยายามของเครื่องยนต์นั้นดำเนินการผ่านเอกสารแจกเชิงกลซึ่งรวมเข้ากับส่วนท้ายของกระปุกเกียร์
Good Gelding ระบบขับเคลื่อนทุกล้อของเมอร์เซเดสได้รับผลกระทบเป็นหลักจากปรัชญาของ บริษัท-ซีดานเมอร์เซเดสคลาสสิกควรเป็นไดรฟ์ล้อหลัง ดังนั้นแรงบิดจะถูกกระจายระหว่างล้อหน้าและล้อหลังในอัตราส่วน 35:65 เปอร์เซ็นต์ อัตราส่วนนี้อยู่ตลอดเวลาและไม่เคยเปลี่ยนแปลง การกระจายความพยายามของเครื่องยนต์นั้นดำเนินการผ่านเอกสารแจกเชิงกลซึ่งรวมเข้ากับส่วนท้ายของกระปุกเกียร์ 4Matic ค่อนข้างประสบความสำเร็จในการลากรถไปตามถนนที่ไม่ดีแม้ว่าข้อเท็จจริงที่ว่าทั้งสามส่วนต่างไม่ได้ติดตั้งล็อค เมอร์เซเดสตามปกติไปในทางของเขาเองบังคับให้ ETS ทั้งหมด -ขับเคลื่อนล้อ (ควบคุมคลัทช์อิเล็กทรอนิกส์กับถนน) อาจจะถูกต้อง - การติดตั้ง ETS ซึ่งเป็นส่วนหนึ่งของระบบเบรกมาตรฐานมีราคาไม่แพงในขณะที่มีขนาดกะทัดรัดและเชื่อถือได้
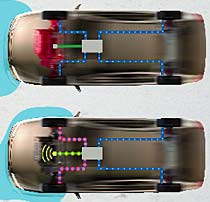
หลักการของการทำงาน ETS คือ: ถ้าหนึ่งในล้อเริ่มลื่นนั่นคือสูญเสียการยึดเกาะกับถนนแล้วมันจะช้าลงทันที ดังนั้นพลังของแรงบิดจะถูกโยนลงไปที่อีกวงล้อที่รถยังคงลากอยู่ หากล้อหน้าหรือล้อหลังลื่นอย่างสมบูรณ์พวกเขาก็ยังช้าลง แรงผ่านส่วนต่างของศูนย์จะถูกถ่ายโอนตามลำดับหรือไปข้างหน้า แต่ยังคงอยู่ในอัตราส่วน 35:65 ไม่มีการปิดระบบ ETS ที่ถูกบังคับ - มันจะลบการควบคุมล้อหน้าโดยอัตโนมัติด้วยความเร็วมากกว่า 80 กม./ชม. และด้านหลัง - มากกว่า 120 กม./ชม.
 ร่องไม่เสีย ไดรฟ์ทดสอบของเราแสดงให้เห็นว่าเมอร์เซเดส 4Matic กลายเป็นความไม่สมบูรณ์ที่สุดในหมู่ญาติห่าง ๆ ของเขา ในแง่ที่ว่าพฤติกรรมของเขาชวนให้นึกถึงมารยาทของซีดานขับเคลื่อนล้อหลังคลาสสิก ในช่วงเริ่มต้นที่คมชัดจากสถานที่บนพื้นผิวที่เต็มไปด้วยหิมะล้อหลังทำงานเป็นระยะเวลาหนึ่งด้วยการลื่น - ด้านหน้านั้นน้อยเกินไปที่จะเริ่มลากรถไปข้างหน้าทันที แต่ในตอนต้นของการเร่งความเร็วไม่มีลักษณะใดของการขับเคลื่อนล้อหลังย้อนกลับในแจ๊สมีเพียงผู้หญิง - แม้แต่ความสนใจด้านหน้า 35 คนก็เพียงพอที่จะรักษาเสถียรภาพของคำที่กำหนดไว้
ร่องไม่เสีย ไดรฟ์ทดสอบของเราแสดงให้เห็นว่าเมอร์เซเดส 4Matic กลายเป็นความไม่สมบูรณ์ที่สุดในหมู่ญาติห่าง ๆ ของเขา ในแง่ที่ว่าพฤติกรรมของเขาชวนให้นึกถึงมารยาทของซีดานขับเคลื่อนล้อหลังคลาสสิก ในช่วงเริ่มต้นที่คมชัดจากสถานที่บนพื้นผิวที่เต็มไปด้วยหิมะล้อหลังทำงานเป็นระยะเวลาหนึ่งด้วยการลื่น - ด้านหน้านั้นน้อยเกินไปที่จะเริ่มลากรถไปข้างหน้าทันที แต่ในตอนต้นของการเร่งความเร็วไม่มีลักษณะใดของการขับเคลื่อนล้อหลังย้อนกลับในแจ๊สมีเพียงผู้หญิง - แม้แต่ความสนใจด้านหน้า 35 คนก็เพียงพอที่จะรักษาเสถียรภาพของคำที่กำหนดไว้ ในทางกลับกันในสนาม Khodynsky ที่ว่างเปล่าการปรากฏตัวของระบบ ESP (ระบบเสถียรภาพของหลักสูตร) \u200b\u200bเริ่มระคายเคือง เธอบีบคอเครื่องยนต์ทันทีถ้ารถอย่างน้อยก็ลื่นไถล
เป็นผลให้เราเชื่อว่าระบบขับเคลื่อนล้อทั้งหมดบน Mercedes ถูกสร้างขึ้นโดยเฉพาะเพื่อเพิ่มความปลอดภัยในการควบคุม มันไม่เคยเกิดขึ้นกับรถที่มีดาวสามลำบนฝากระโปรงแม้กระทั่งเฉดสีของคุณสมบัติออฟโรดโดยเดมเลอร์-เบนซ์
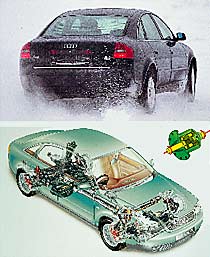 กลไกยอดนิยม Audi A6 All -Wheel Drive สร้างขึ้นบนหลักการที่แตกต่าง - ไม่มีอุปกรณ์อิเล็กทรอนิกส์กลศาสตร์บริสุทธิ์ พื้นฐานของระบบ Quattro คือ Torsen ที่แตกต่างกัน ในช่วงปลายยุค 50 เขาถูกประดิษฐ์โดยวิศวกร Glesman ชื่อนี้เป็นตัวย่อของสองคำภาษาอังกฤษแรงบิดและการรับรู้ซึ่งสามารถแปลได้อย่างอิสระว่าเป็นช่วงเวลา เพราะ Torsen ทำงานแบบนี้ ที่เหลือในแห้งแม้แอสฟัลต์แรงจากเครื่องยนต์จะถูกส่งไปยังเพลาหน้าและด้านหลังในอัตราส่วน 50:50 และเมื่อล้อลื่นความแตกต่างเริ่มขับความอยากระหว่างแกนภายใน 25 คูณ 75 เปอร์เซ็นต์ นั่นคือขึ้นอยู่กับเงื่อนไข A6 นั้นอยู่ข้างหน้าเป็นระยะและขับเคลื่อนล้อหลังมากขึ้น
กลไกยอดนิยม Audi A6 All -Wheel Drive สร้างขึ้นบนหลักการที่แตกต่าง - ไม่มีอุปกรณ์อิเล็กทรอนิกส์กลศาสตร์บริสุทธิ์ พื้นฐานของระบบ Quattro คือ Torsen ที่แตกต่างกัน ในช่วงปลายยุค 50 เขาถูกประดิษฐ์โดยวิศวกร Glesman ชื่อนี้เป็นตัวย่อของสองคำภาษาอังกฤษแรงบิดและการรับรู้ซึ่งสามารถแปลได้อย่างอิสระว่าเป็นช่วงเวลา เพราะ Torsen ทำงานแบบนี้ ที่เหลือในแห้งแม้แอสฟัลต์แรงจากเครื่องยนต์จะถูกส่งไปยังเพลาหน้าและด้านหลังในอัตราส่วน 50:50 และเมื่อล้อลื่นความแตกต่างเริ่มขับความอยากระหว่างแกนภายใน 25 คูณ 75 เปอร์เซ็นต์ นั่นคือขึ้นอยู่กับเงื่อนไข A6 นั้นอยู่ข้างหน้าเป็นระยะและขับเคลื่อนล้อหลังมากขึ้น มันค่อนข้างยากที่จะอธิบายการทำงานของกลไกดังกล่าว เราจะพยายามอธิบายเกี่ยวกับนิ้วมือว่าเม่นเหล่านี้มีเพศสัมพันธ์อย่างไร ความแตกต่างถูกรวมเข้ากับกล่องเกียร์และเป็นเคสปิดซึ่งสองเพลาโผล่ออกมาโดยประมาณพูดบนเพลาหน้าและด้านหลัง เพลาทั้งสองอยู่ในการมีส่วนร่วมที่เข้มงวด
Torsen Differential ไม่ได้ตรวจสอบการหมุนของล้อ แต่คลัตช์ของพวกเขากับถนนในจุดติดต่อตามที่ผู้เชี่ยวชาญกล่าว นั่นคือมันตอบสนองต่อความพยายามล้อที่จำเป็นในขณะนี้เพื่อหมุนและดัน/ดึงรถไปในทิศทางที่ถูกต้องตามปกติ การกระจายแรงจากมอเตอร์เกิดขึ้นในเวลาที่เหมาะสมเกือบจะทันทีตามสภาพถนน
 นั่งและเป็นผู้นำ Audi A6 พร้อมเครื่องยนต์ 2.4 -Liter และมอเตอร์เกียร์เชิงกลเข้าชมการทดสอบของเรา โดยวิธีการในกรณีนี้มันไม่สำคัญว่า Mercedes และ Subaru ติดตั้งปืนกล จากข้อมูลของ Autopilot ความบริสุทธิ์ของการทดลองได้รับการสังเกตอย่างเต็มที่ ประการแรก Mercedes 4Matic ผลิตได้เกือบจะเป็นเกียร์อัตโนมัติที่เกี่ยวข้องกับการวางแนวไปยังตลาดอเมริกา Subaru ซึ่งจะกล่าวถึงด้านล่างสามารถซื้อได้ด้วยกล่องด้วยตนเอง แต่เป็นปืนกลที่เป็นที่ต้องการอย่างแม่นยำ ประการที่สองในรถทั้งสามคันขับเคลื่อนทุกล้อในโหมดใดก็ได้ทำงานได้เช่นเดียวกับตัวเองโดยไม่ต้องใช้การเคลื่อนไหวของร่างกายที่ไม่จำเป็นจากคนขับ
นั่งและเป็นผู้นำ Audi A6 พร้อมเครื่องยนต์ 2.4 -Liter และมอเตอร์เกียร์เชิงกลเข้าชมการทดสอบของเรา โดยวิธีการในกรณีนี้มันไม่สำคัญว่า Mercedes และ Subaru ติดตั้งปืนกล จากข้อมูลของ Autopilot ความบริสุทธิ์ของการทดลองได้รับการสังเกตอย่างเต็มที่ ประการแรก Mercedes 4Matic ผลิตได้เกือบจะเป็นเกียร์อัตโนมัติที่เกี่ยวข้องกับการวางแนวไปยังตลาดอเมริกา Subaru ซึ่งจะกล่าวถึงด้านล่างสามารถซื้อได้ด้วยกล่องด้วยตนเอง แต่เป็นปืนกลที่เป็นที่ต้องการอย่างแม่นยำ ประการที่สองในรถทั้งสามคันขับเคลื่อนทุกล้อในโหมดใดก็ได้ทำงานได้เช่นเดียวกับตัวเองโดยไม่ต้องใช้การเคลื่อนไหวของร่างกายที่ไม่จำเป็นจากคนขับ ดังนั้น Audi A6 Quattro อุปกรณ์ที่สมดุลที่สุดโดยปราศจากอคติของไดรฟ์ด้านหน้าหรือด้านหลัง คนเดียวที่อยู่บนทางหลวงง่าย ๆ และในเวลาเดียวกันก็ไม่ได้อับอายป้ายชื่อ quattro ในช่วงเริ่มต้นที่คมชัดจากสถานที่เขารีบรีบเข้าไปในระยะทางหิมะโดยไม่พยายามที่จะหลงทางจากเส้นทางที่คนขับตั้งใจ เมื่อล้อหนึ่งหรือสองล้อตกลงไปบนศีรษะล้านน้ำแข็งมันก็เพียงพอแล้วที่จะปรับทิศทางการเคลื่อนไหวด้วยพวงมาลัยอย่างถูกต้อง - ไม่ใช่ความปรารถนาเล็กน้อยที่จะบุกเข้าไปในลื่นไถล!
ในพฤติกรรมของมันนี่เป็นรถที่คาดการณ์ไว้มากที่สุดจากทรินิตี้ทั้งหมด: เขาเรียบง่ายและไม่ลังเลไปที่ที่เจ้าของของเขาต้องการ
กิ้งก่า แบรนด์ Subaru ในชีวิตเกี่ยวข้องกับผู้คนที่มีระบบขับเคลื่อนทุกล้อ และมีเพียงไม่กี่คนที่คิดว่าวิศวกรของ บริษัท ใช้หลักการที่แตกต่างอย่างสิ้นเชิงกับ Mercedes หรือ Audi การกระจายแรงบิดอย่างหนักระหว่างแกนใน Subaru นั้นตรงข้ามกับระบบที่ปรับให้เข้ากับสภาพถนนโดยอัตโนมัติ
ในการกำจัดของเราคือซีดานมรดกที่มีเกียร์อัตโนมัติ ในสถานการณ์ถนนปกติบนแอสฟัลต์แห้ง 90 เปอร์เซ็นต์ของแรงบิดจะถูกส่งไปยังล้อหน้า ในกรณีที่ลื่นไถลพวกเขาจะมีการแจกจ่ายซ้ำในขณะที่อัตราส่วน 50:50
นี่เป็นไปได้ด้วยการใช้การมีเพศสัมพันธ์พิเศษในกล่องเกียร์ที่ทำงานบนหลักการของการยึดเกาะแบบดั้งเดิม เฉพาะในนั้นไม่ใช่ดิสก์เดียว แต่เยอะมาก และแรงเสียดทานการทำลายล้างสำหรับคลัตช์ใด ๆ ไปเพื่อความดี บนล้อมรดกทั้งหมดเซ็นเซอร์พิเศษได้รับการแก้ไขซึ่งตรวจสอบความเร็วของการหมุนของแกนของรถ ทันทีที่มันเพิ่มขึ้น - นั่นคือในช่วงเวลาของการลื่นไถลเซ็นเซอร์จะส่งสัญญาณไปยังไดรฟ์ไฮดรอลิกที่เริ่มกดคู่ของการมีเพศสัมพันธ์เพิ่มการยึดเกาะของดิสก์อย่างราบรื่น ส่วนหนึ่งของแรงฉุดถูกเลือกจากเพลาหน้าและนำไปยังล้อหลัง
ในรถยนต์ที่มีเกียร์กลไกบทบาทของ Hydromoft เล่นโดย Wylian ความแตกต่างของมันอยู่ในกรณีที่ไม่มีไดรฟ์ไฮดรอลิก แผ่นดิสก์หมุนในของเหลวพิเศษซึ่งมีแรงเสียดทานเพิ่มขึ้น (ในช่วงเวลาของการลื่นไถล) เริ่มข้นขึ้นอย่างแข็งขัน คลัทช์ของดิสก์เพิ่มขึ้นและแรงฉุดถูกแจกจ่ายอีกครั้งเพื่อสนับสนุนล้อเหล่านั้นที่มีการยึดเกาะที่ดีที่สุดไปยังถนน ระบบมีความน่าเชื่อถือทดสอบตามกาลเวลา แต่ทำงานด้วยความล่าช้าเล็กน้อยในทางตรงกันข้ามกับการมีเพศสัมพันธ์แบบไฮโดรเมอร์ ระบบเกียร์อัตโนมัติแบบดั้งเดิมยังให้ตำแหน่ง L ซึ่งหมายถึงเกียร์ที่ต่ำกว่า เมื่อเปิดใช้งานแรงดึงที่ส่งจากมอเตอร์ไปยังล้อเพิ่มขึ้นประมาณหนึ่งและครึ่งเวลา ในโมเดลที่มีกล่องเชิงกลการเปลี่ยนด้วยตนเองเป็นเกียร์ที่ลดลง
BANGE of TRP ด้วยความต่ำของคู่แข่งที่ค่อนข้างสองคนค่าใช้จ่ายของมรดก Subaru กลายเป็นผู้ที่ผ่านไปได้มากที่สุดและทำให้เราพอใจกับตัวละครกีฬาที่แท้จริง ใช่เมื่อเริ่มต้นอย่างคมชัดจากสถานที่บนแอสฟัลต์ที่ปกคลุมไปด้วยโจ๊กน้ำแข็งพฤติกรรมของเขาในวินาทีแรกคือการขับเคลื่อนล้อหน้าตรงไปตรงมา วิถีการเริ่มต้นจะต้องปรับด้วยพวงมาลัยเล็กน้อย แต่ในการแข่งขันตามแนว Khodynsky ที่ปกคลุมไปด้วยหิมะความรู้สึกนี้หายไปอย่างสมบูรณ์ ยิ่งกว่านั้นการขว้างรถคันนี้ตามคำร้องขอของช่างภาพในการลื่นไถลนั้นไม่ใช่เรื่องง่ายในครั้งแรก มรดกตกลงที่จะแสดงให้เห็นถึงการลื่นไถลที่ใช้งานอยู่เฉพาะกับงานพร้อมกันโดยพวงมาลัยและในเวลาเดียวกันแก๊ส-คาร์-กาซ ตัวละครกีฬาจริง
ดังนั้นในซีดานขับเคลื่อนทุกล้อคุณไม่ควรพิชิตดินแดนบริสุทธิ์ การขับเคลื่อนล้อเต็มบนรถยนต์มีความซับซ้อนมากขึ้นดังนั้นจึงมีราคาแพงกว่าในการบำรุงรักษาและซ่อมแซม ประการที่สามไดรฟ์ทุกล้อเป็นตัวเลือกที่เหมาะสำหรับคนขับรถที่มีความทะเยอทะยานที่ต้องการมีรถชั้นธุรกิจ แต่ไม่ได้ขึ้นอยู่กับความหลากหลายของสภาพอากาศในเมืองและสนุกกับการขับรถทุกวัน
ส่งข้อความ Nikolay Sukhov ภาพถ่าย Alexey Ilyin
แหล่งที่มา: "Autopilot"



